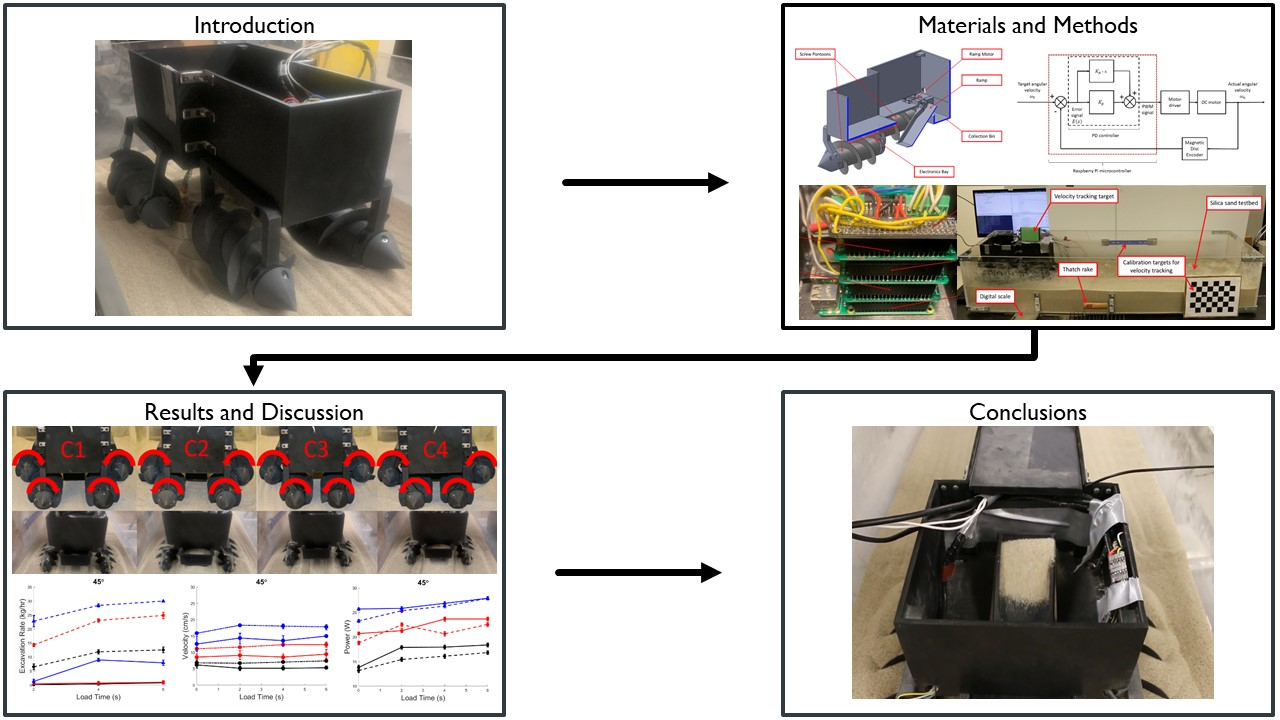
Excavation of regolith is the enabling process for many of the in-situ resource utilization (ISRU) efforts that are being considered to aid in the human exploration of the moon and Mars. Most proposed planetary excavation systems are integrated with a wheeled vehicle, but none yet have used a screw-propelled vehicle which can significantly enhance the excavation performance. Therefore, CASPER, a novel screw-propelled excavation rover is developed and analyzed to determine its effectiveness as a planetary excavator. The excavation rate, power, velocity, cost of transport, and a new parameter, excavation transport rate, are analyzed for various configurations of the vehicle through mobility and excavation tests performed in silica sand. The optimal configuration yielded a 30 kg/hr excavation rate and 10.2 m/min traverse rate with an overall system mass of 3.4 kg and power draw of less than 30 W. These results indicate that this architecture shows promise as a planetary excavation because it provides significant excavation capability with low mass and power requirements. Corresponding author(s) Email: [email protected]